0,00 €
0
0 produit(s) -No products
A déterminer Livraison
0,00 € TVA
0,00 € Total
TTC
Quantité
Total
Product successfully added to your shopping cart
Il y a 0 produits dans le panier. Il y a 0 produits dans le panier.
Total (tax incl.)
Référence : svm-72026
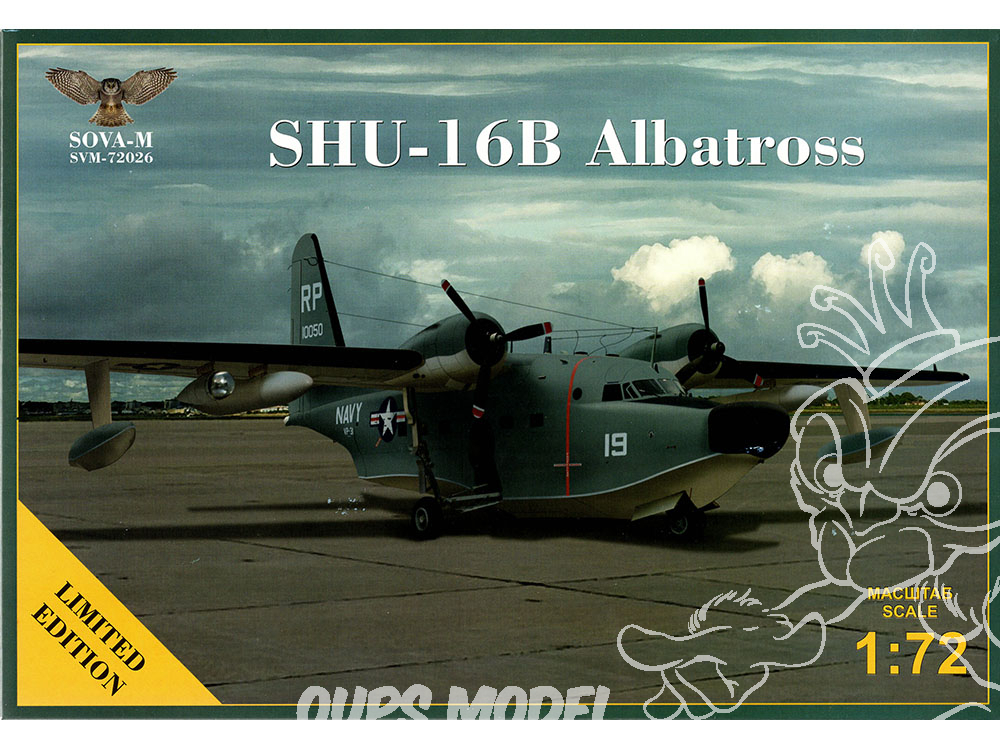
SOVA-M maquette avion 72026 SHU-16B Albatross 1/72
SHU-16B Albatross 1/72
Produit neuf
En achetant ce produit vous pouvez gagner jusqu'à 94 points de fidélité. Votre panier totalisera 94 points de fidélité pouvant être transformé(s) en un bon de réduction de 1,88 €.
Note moyenne : 10/10 - Nombre d'avis : 1
2022
* Cliquez sur les miniatures pour ouvrir le mode galerie
En savoir plus

En 1944, l'US Navy réclama un appareil amphibie de recherche, capable de remplacer le JRF Goose. Cet appareil devait être plus grand et disposer d'une plus grande autonomie. Grumman proposa un appareil bimoteur à ailes hautes, au train tricycle entièrement rétractable et capable d'emporter 10 passagers ou 5000 livres de fret. Il pouvait également emporter des armes ou des bidons supplémentaires sous les ailes. Les flotteurs sous les ailes contenaient également de l'essence.
Le projet, désigné G-64, était en fait un G-73 Mallard agrandi. Il fut accepté et 2 prototypes, désignés XJR2F-1, furent construits. Il effectua son vol inaugural le 24 octobre 1947.
Il entra en service en 1949. Il fut désigné SA-16A par l'USAF, qui en reçut 297 exemplaires. La plupart furent versés à l'Air Rescue Service, créé en 1946 afin de porter secours aux équipages tombés en territoire hostile. L'US Navy désigna les siens UF-1. Le UF-1 était décliné en 3 versions : le UF-1 de reconnaissance et de recherche, le UF-1T d'entraînement, et le UF-1L destiné à opérer avec des skis, en Antarticque.
En 1955, Grumman étudia une nouvelle version, avec une envergure accruede 5 mètres, des ailerons et une dérive agrandis, et une charge utile plus élevée. Elle fut appelée UF-2 pour l'US Navy et SA-16B pour l'USAF. Dès 1957, la plupart des anciens appareils seront portés à ce standard.
En 1962, il reçut la nouvelle désignation HU-16. Les SA-16A devinrent des HU-16A, et les SA-16B des HU-16B. Les UF-1, UF-1L et UF-1T devinrent respectivement HU-16C, LU-16C et TU-16C. Les UF-2 devinrent des HU-16D. Quand aux appareils de l'US Coast Guards, désignés à l'origine UF-1G et disposant de l'envergure accrue, ils furent désignés HU-16E.
Le SHU-16B, destiné à la lutte anti sous-marine, apparut en 1961. Il était équipé de quelques charges de profondeur, d'un radome de nez, d'un MAD rétractable, de contre-mesures électroniques et d'un phare.
Caractéristiques
| Echelle | | 1/72 |
| Fabricant |  | Sova-M |
| Conseillé à partir de | | 14ans |
| Epoque | | 1960 |
| Matériau | | Plastique injecté |
| Inclus colle peinture | | Non |
| Genre |  | Avion |
| Type | | Hydravion |
| Modéle | | Grumman |
| Nationalité |  | Americaine |
Avis
 | maquette |
| René L. le 14/01/2023 | très belle maquette, beaucoup de précision des pièces . |